The Industrial IoT lab is an advanced test environment created to accelerate R&D in production and warehousing IoT technology. Located in Ghent, Belgium; the lab offers 300m2 of open experimentation space to foster regional and international co-operations in Industry 4.0 with a focus on smart and connected industries. Our research activities intersect robotics, machine learning, localization and wireless, and cloud computing.

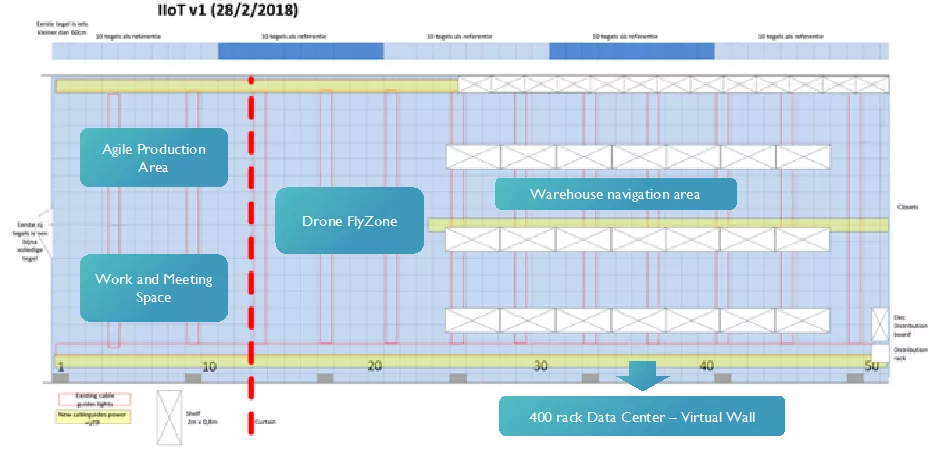
Agile production area
Around 40m2 of space is dedicated to agile production research. Experiments such as material handling, flexible assembly and intelligent automation can be executed. This area offers:
- A Universal Robot UR-3 cobot arm with a 7th axis 1.5m linear drive – 3 kg load
- A Franka Panda arm cobot – 2kg load
- A high-precision 1m diameter turntable – 25kg load
- Two 2m linear conveyors – 50kg load


Warehouse emulator
We offer a 240m2 representative warehouse environment where innovators can validate drones, AGVs and other mobile technologies. The ceiling above provides railings with power and connectivity to integrate hardware and sensors. Two distinct spaces are available:
- An open space of 6m (l) x 11m (w) x 2.5 m (h) for drone tests, navigation & VR experiments.
- An area with racks of 17m (l) x 11m (w) x 2.5 m (h) for warehousing scenarios.
Technology infrastructure
The IIoT lab highlights IDLab’s extensive expertise in wireless and internet research by bringing together our advanced wireless and cloud testbeds to advance Industry 4.0.
Drones
The IIoT Lab offers a range of drones for experimentation and research. Two staff researchers are certified drone pilots with a lot of practical outdoor and indoor flight experience.
- 2 x Intel Aero – equipped with mobile UWB tags, optical flow and altimeter LiDAR
- 1 x DJI M100 – equipped with Stereo and ultrasonic sensors and Intel NUC i7
- 1 x DJI Mavic Air
- 3 x 3DR Solo
Wireless Testbed
The ceiling of the IIoT lab adopts IDLab’s w-iLab-t wireless environment, equipped with multiple interfaces, including 802.11 a/b/g/n/ac, Bluetooth, IoT sensor nodes with 802.15.4 interfaces, ultra-wide band (UWB) antennas and user-defined cognitive radios.
24 UWB anchor nodes are installed on the walls at various locations and can be controlled over w-iLab-t for wide-area indoor localization, drone flight or product tracking experiments.
Experimenters can determine which interfaces will be used, and what software is installed on the embedded nodes to orchestrate wireless performance across a large number of devices.

Data Center
The IIoTLab offers gigabit access to IDLab's advanced data center. With over 400 bare-metal servers and a 35+ cluster of NVIDIA GPUs, we can scale industry 4.0 computing demands easily. The data center can be used in Industry 4.0 experiments for:
- Cleaning, building and training machine learning models
- Enterprise and Cloud application scalability and secure testing (e.g. WMS/ERPs)
- Off-loading computation from sensors and robots
- Distributed and concurrent simulations
- Big data and enterprise data processing
People
- Pieter Van Molle
- Eli De Poorter
- Jeroen Hoebecke
- Jen Rossey
- Nicola Macoir
- Matteo Ridolfi
- Jono Vanhie-Van Gerwen
- Amina Šljivo
- Pieter Becue
- Brecht Vermeulen
Projects
Key publications
-
Ferraro, S., Mazzaglia, P., Verbelen, T., & Dhoedt, B. (2023). FOCUS: Object-centric world models for robotics manipulation. In RSS2023, Robotics: Science and Systems (pp. 1-11).
-
Safa, A., Verbelen, T., Ocket, I., Bourdoux, A., Sahli, H., Catthoor, F., & Gielen, G. (2023, May). Fusing event-based camera and radar for slam using spiking neural networks with continual stdp learning. In 2023 IEEE International Conference on Robotics and Automation (ICRA) (pp. 2782-2788). IEEE.
-
Çatal, O., Verbelen, T., Van de Maele, T., Dhoedt, B., & Safron, A. (2021). Robot navigation as hierarchical active inference. Neural Networks, 142, 192-204.
- Ridolfi, M., Macoir, N., Vanhie-Van Gerwen, J., Rossey, J., Hoebeke, J., & De Poorter, E. (2019). Testbed for warehouse automation experiments using mobile AGVs and drones. IEEE CONFERENCE ON COMPUTER COMMUNICATIONS WORKSHOPS (IEEE INFOCOM 2019 WKSHPS), 919–920. https://doi.org/10.1109/infcomw.2019.8845218
- S. Bohez, T. Verbelen, S. Leroux, E. Coninck, B. Vankeirsbilck, P. Simoens, B. Dhoedt, “Robot navigation using a variational dynamics model for state estimation and robust control”, Deep RL Workshop – NeurIPS 2018.
